Control System
Piezoelectric Actuator
We research about "micro-macro bilateral control using piezoelectric actuator". The actuator (please see the figure) is driven by voltage and has high spatial resolution. Our research goal is, by combining the actuator and bilateral control, making it possible that an operator can easily manipulate micro-nano-scale objects. The position scaling factor has reached 40,000. It means, in theory, we can manipulate extremely small objects like 10nm as if it is 40cm.
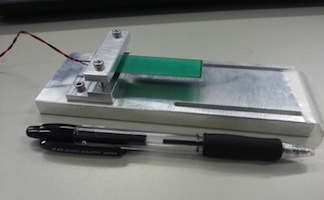
piezoelectric actuator
Network-Based Control
If you want to remotely control the robot, the transmission of information is done through the network each other. However, when network is used, communication problems such as time-delay, jitter, packet loss, packet order inversion, and congestion occurs. These may degrade the stability and performance of the control system at the time. For example, time-delay that is about a hundredth of a second may make the control system out of control. Our research is investigating the effect of network-specific problems on the control system and finding a way to resolve these problems from the point of view of control.
 —
—
 —
—